
The Unocycle created by Manu Patil, Colin Takeda, George Tighe, and Justin Yuan
Background
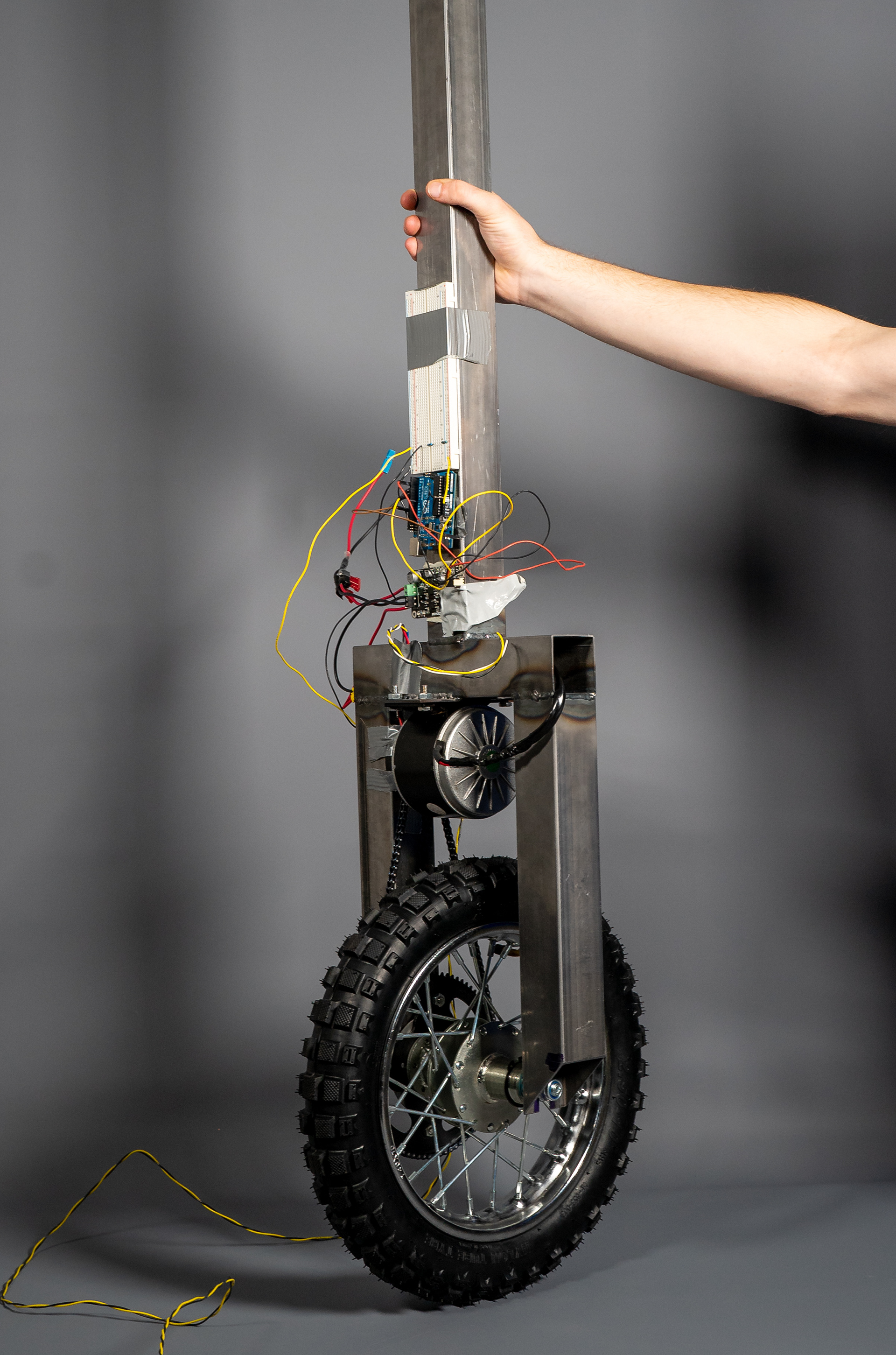
Our intention was always to fabricate and control a self-balancing unicycle. Unfortunately, during our last sprint, we ran into multiple issues with the implementation of a rotary encoder. Our team had reached out to multiple project teams on campus and found ourselves at a crossroads two days before the final presentation. We had concluded that despite any efforts we may put in, it was certainly impossible to have self-balancing implemented without the proper sensing suite. Thus, we decided to make the bold decision to pivot our design to an electric scooter. This was done due to the fact that we found it more appealing to present something functional to the teaching team and our peers rather than speaking about our failed self-balancing unicycle. In order to make this vision a reality we had to make several modifications to the existing structure.
RESULTS
Our scooter required a front wheel assembly, handlebars, power controls, battery integration, and general organization of electrical systems. We chose to use our existing unicycle as a rear-wheel assembly to drive the scooter and then chose to use the front portion of a Razor scooter as it already contained a front wheel assembly and steering column. We modified the steering column to be longer by cutting on the top handlebars and welding it to a longer piece of aluminum. We used wood scrap to create the deck of the scooter to create a more comfortable ride experience. For controls, we 3D printed mounts for a dead-man switch, accelerator, and decelerator to be attached to the tube of the handles. These controls were then wired through the steering column to the electrical system mounted on the battery enclosure. In the end, we were able to completely convert the unicycle to an electric scooter in 36 hours. This final product is much more reliable and easy to use than our previous expectations. We are proud of the result as we worked hard to have something worthwhile and presentable during the final presentations. We hope to keep working on the scooter to improve safety and speed. We also plan on replacing many components like the motor control and the front wheel to improve overall performance.